The following sections describes the available components in Automaduino. They’re grouped like in the editor into three sections: Output, User Input and Sensors.
This the multi-page printable view of this section. Click here to print.
Components
What components are currently supported?
- 1: Output
- 1.1: LED
- 1.2: Buzzer
- 1.3: Vibration Motor
- 1.4: Relay
- 1.5: Servo
- 2: Sensors
- 2.1: Motion Sensor
- 2.2: Temperature Sensor
- 2.3: Humidity Sensor
- 2.4: Vibration Sensor
- 2.5: Loudness Sensor
- 2.6: Ultrasonic Ranger
- 3: User Input
- 3.1: Button
- 3.2: Switch
- 3.3: Slider
- 3.4: Potentiometer
1 - Output
Output components like LEDs or buzzers do not take an input but instead manipulate their environment.
1.1 - LED
A LED commonly used with a resistor emits light.
Information

Connection scheme
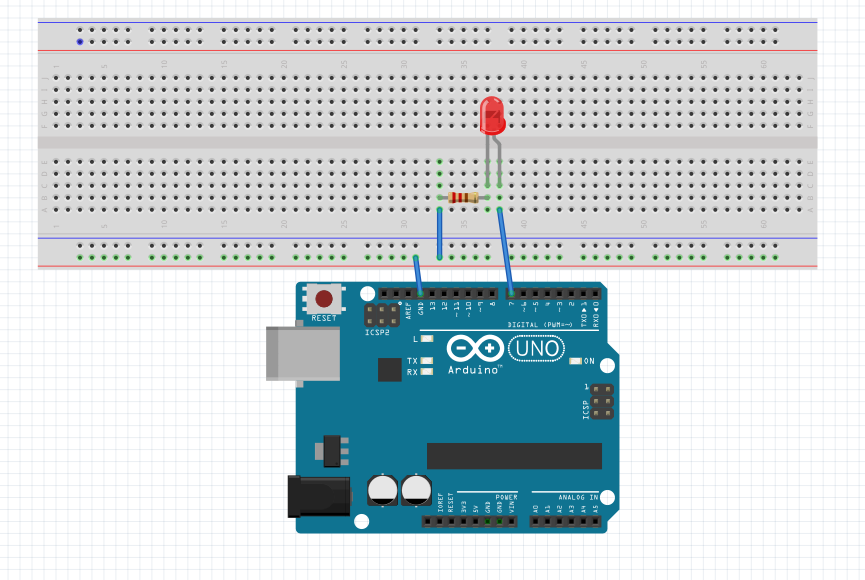
Scheme made with Fritzing.
Functions
On
On State
Switches the component on.
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
function_0_led();
}
digitalWrite(pin_0_led, HIGH);
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
state = 1;
}
Off
Off State
Switches the component off.
void function_0_led(){
digitalWrite(pin_0_led, LOW);
function_0_led();
}
digitalWrite(pin_0_led, LOW);
void function_0_led(){
digitalWrite(pin_0_led, LOW);
state = 1;
}
1.2 - Buzzer
A buzzer will emit a sound.
Information

Connection scheme
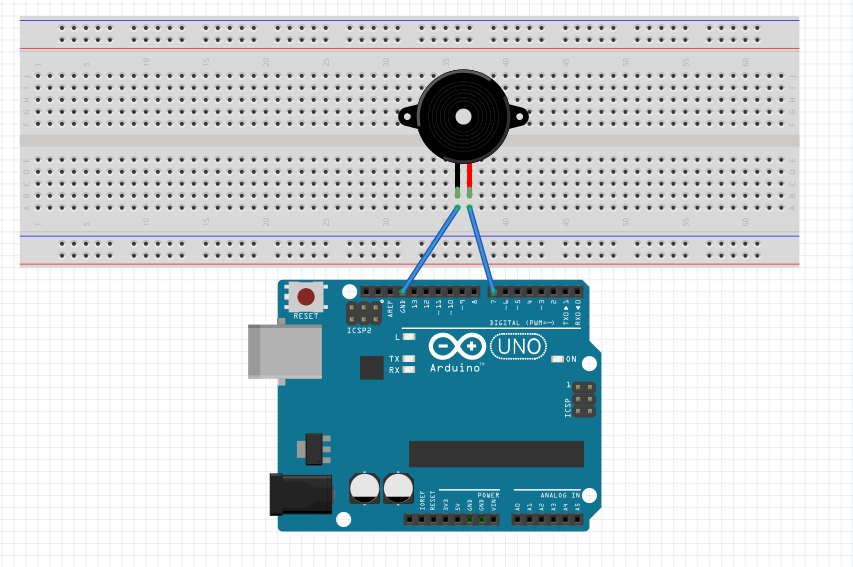
Scheme made with Fritzing.
Functions
On

On State
Switches the component on.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, HIGH);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
state = 1;
}
Off
Off State
Switches the component off.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, LOW);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
state = 1;
}
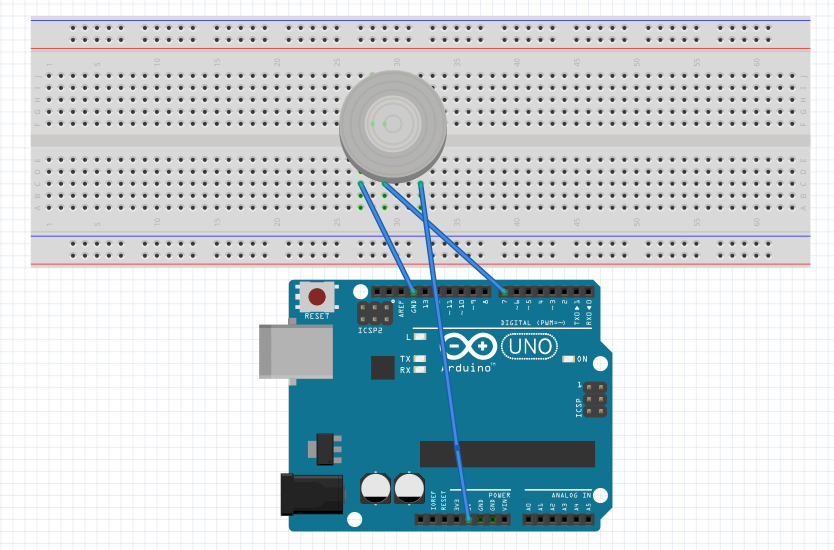
1.3 - Vibration Motor
A vibration motor will vibrate and is for example used in a smartphone.
Information

Connection scheme
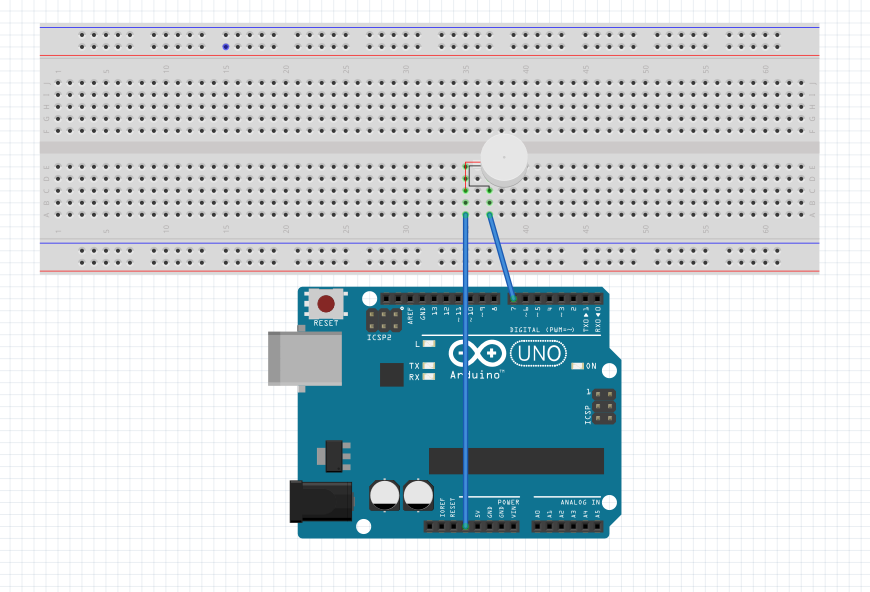
Scheme made with Fritzing.
Functions
On
On State
Switches the component on.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, HIGH);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
state = 1;
}
Off

Off State
Switches the component off.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, LOW);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
state = 1;
}
1.4 - Relay
A relay can be used to turn another electrical component on and off.
Information

Connection scheme
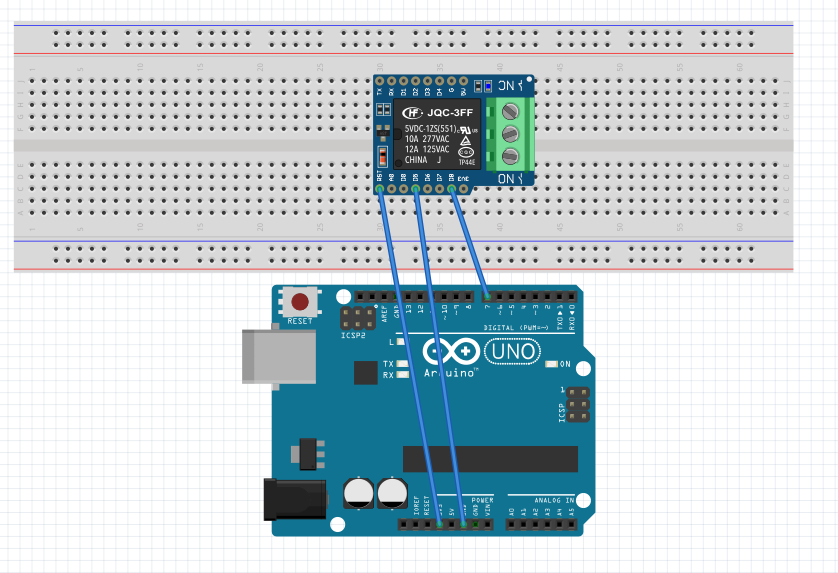
Scheme made with Fritzing.
Functions
On
On State
Switches the component on.
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
function_0_relay();
}
digitalWrite(pin_0_relay, HIGH);
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
state = 1;
}
Off
Off State
Switches the component off.
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
function_0_relay();
}
digitalWrite(pin_0_relay, LOW);
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
state = 1;
}
1.5 - Servo
A servo is a small motor that can be turned.
Information

Connection scheme
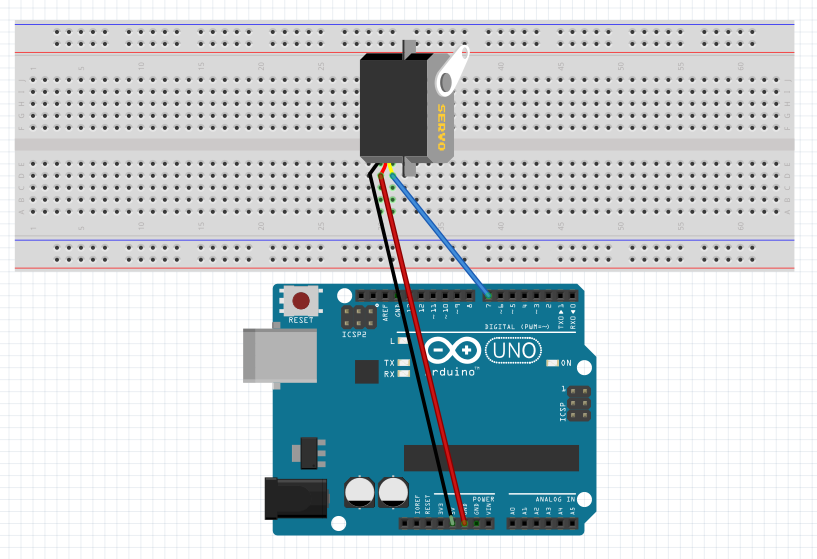
Scheme made with Fritzing.
Functions
Degree

Turn servo to 0 degree

Turn servo to 180 degree
This function will turn the servo to the degree specified in the function name.
void function_1_servo(){
servo_0.write(0);
function_1_servo();
}
servo_0.write(0);
void function_0_servo(){
servo_0.write(0);
state = 1;
}
2 - Sensors
Sensors will gather input from the environment.
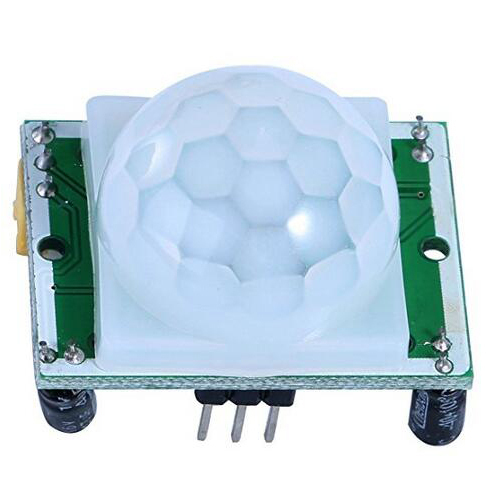
2.1 - Motion Sensor
A motion sensor detects motion within a certain range.
Information
Connection scheme
Scheme made with Fritzing.
Functions
Digital Read

Digital Read State
Reads a digital value.
void function_0_motionSensor(){
int value = digitalRead(pin_0_motionSensor);
function_0_motionSensor();
}
int value = digitalRead(pin_0_motionSensor);
void function_0_motionSensor(){
int value = digitalRead(pin_0_motionSensor);
state = 1;
}
2.2 - Temperature Sensor
A temperature sensor measures the current temperature in the air.
Information
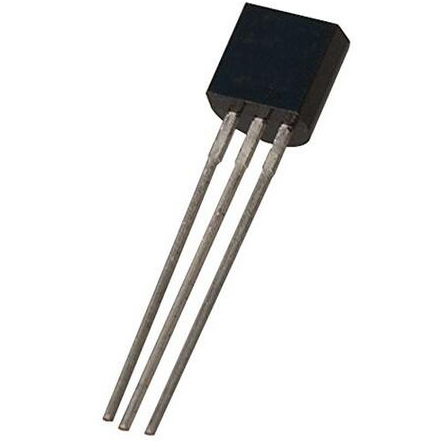
Connection scheme
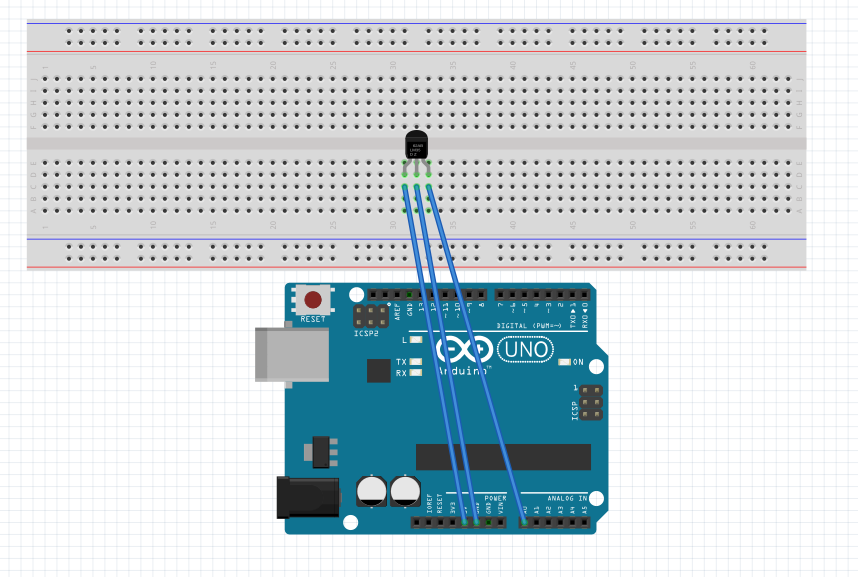
Scheme made with Fritzing.
Functions
Analog Read

Analog Read State
Reads a analog value and transforms it to Celsius.
void function_0_temperatureSensor(){
int value = map(analogRead(pin_0_temperatureSensor), 0, 410, -50, 150);
function_0_temperatureSensor();
}
int value = map(analogRead(pin_1_temperatureSensor), 0, 410, -50, 150);
void function_0_temperatureSensor(){
int value = map(analogRead(pin_1_temperatureSensor), 0, 410, -50, 150);
state = 1;
}
2.3 - Humidity Sensor
A humidity sensor measures the humidity of earth or water.
Information

Connection scheme
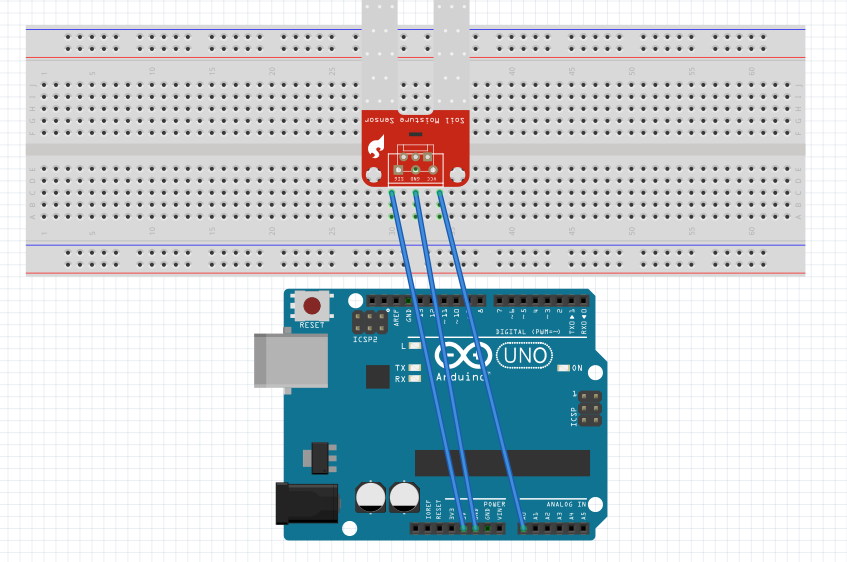
Scheme made with Fritzing.
Functions
Analog Read

Read Analog State
Reads a analog value.
void function_0_humiditySensor(){
int value = analogRead(pin_0_humiditySensor);
function_0_humiditySensor();
}
int value = analogRead(pin_0_humiditySensor);
void function_0_humiditySensor(){
int value = analogRead(pin_0_humiditySensor);
state = 1;
}
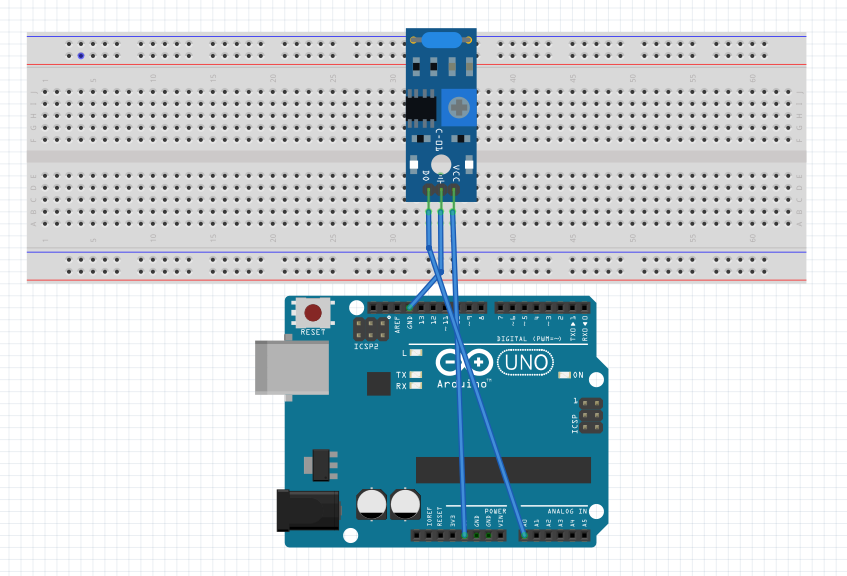
2.4 - Vibration Sensor
A vibration sensor detects vibration next to it.
Information

Connection scheme
Scheme made with Fritzing.
Functions
Digital Read

Digital Read State
Reads a digital value.
void function_0_vibrationSensor(){
int value = digitalRead(pin_0_vibrationSensor);
function_0_vibrationSensor();
}
int value = digitalRead(pin_0_vibrationSensor);
void function_0_vibrationSensor(){
int value = digitalRead(pin_0_vibrationSensor);
state = 1;
}
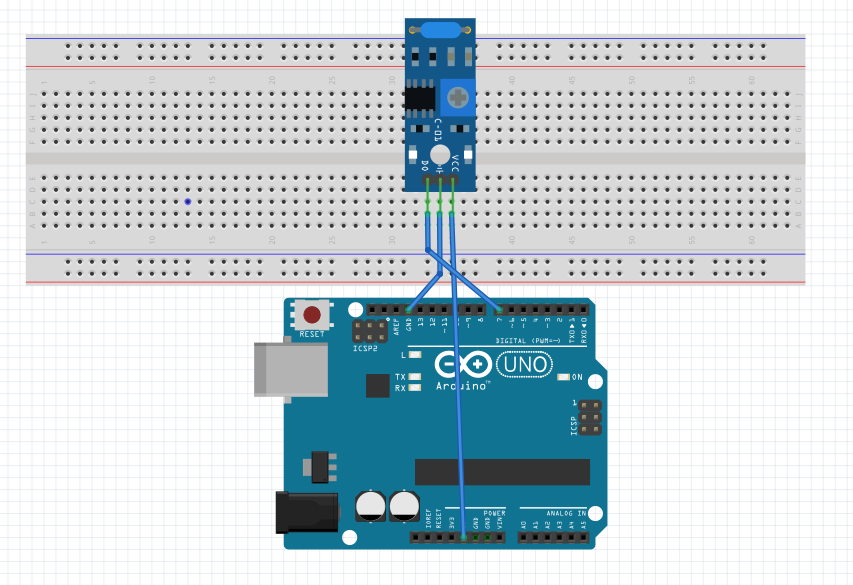
2.5 - Loudness Sensor
A loudness sensor measures noise.
Information
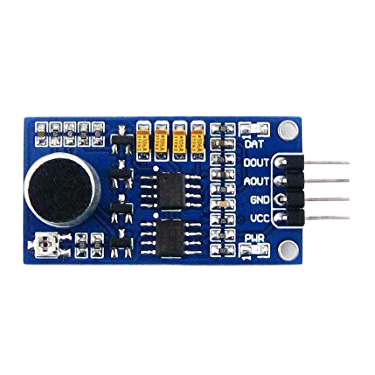
Image by funduino, CC-BY-SA.
Connection scheme
Scheme made with Fritzing.
Functions
Analog Read

Analog Read State
Reads a analog value.
void function_0_Lautst_rke_sensor(){
int value = analogRead(pin_0_loudnessSensor);
function_0_Lautst_rke_sensor();
}
int value = analogRead(pin_0_loudnessSensor);
void function_0_Lautst_rke_sensor(){
int value = analogRead(pin_0_loudnessSensor);
state = 1;
}
2.6 - Ultrasonic Ranger
A ultrasonic ranger uses a ultrasonic wave to measure a distance.
Information

Connection scheme
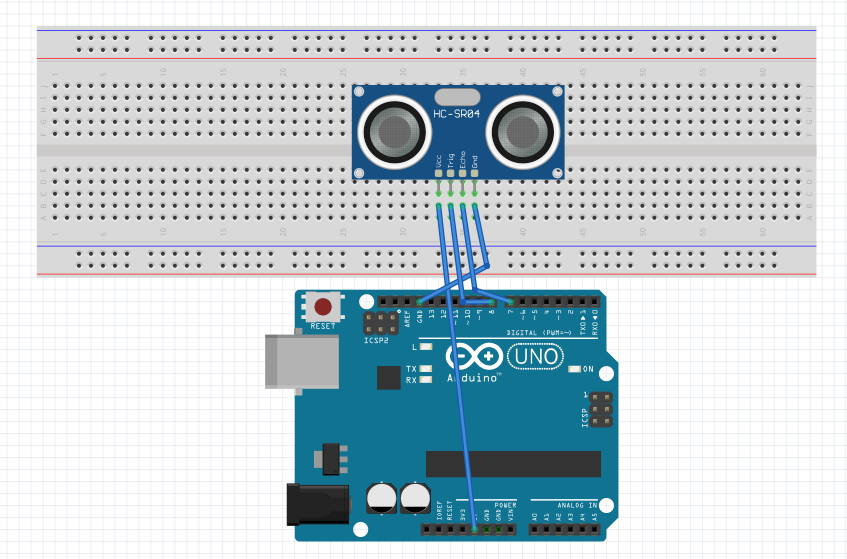
Scheme made with Fritzing.
Functions
Send Wave
Send Wave State
Sends a ultrasonic wave.
void function_0_Ultraschall_messer(){
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
function_1_Ultraschall_messer();
}
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
void function_0_Ultraschall_messer(){
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
state = 1;
}
Receive Wave

Receive Wave State
Receive a ultrasonic wave.
void function_1_Ultraschall_messer(){
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
function_1_Ultraschall_messer();
}
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
void function_1_Ultraschall_messer(){
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
state = 1;
}
3 - User Input
User input components will wait for a user to interact with them.
3.1 - Button
A button will detect if a user presses it.
Information

Connection scheme
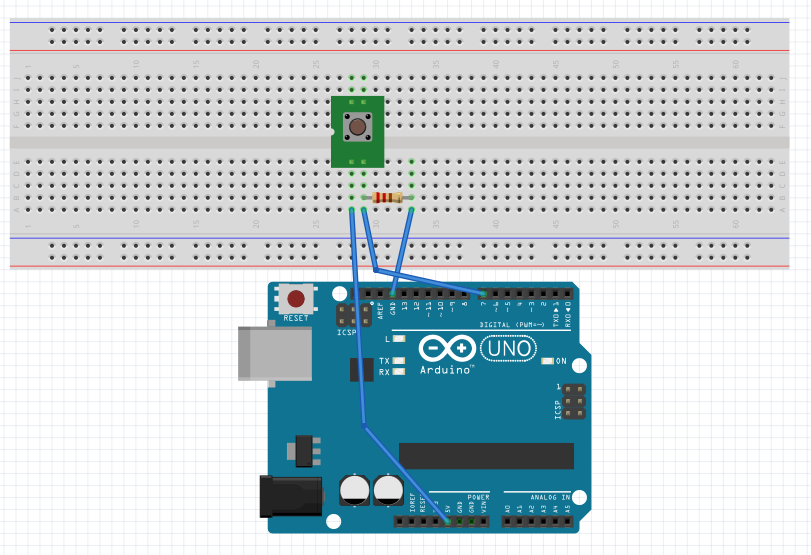
Scheme made with Fritzing.
Functions
Await Input

Await Input State
Awaits a digital value.
void function_0_button(){
int value = digitalRead(pin_0_button);
delay(200);
function_0_button();
}
int value = digitalRead(pin_0_button);
delay(200);
void function_0_button(){
int value = digitalRead(pin_0_button);
delay(200);
state = 1;
}
3.2 - Switch
A switch works similar to a button to detect an input.
Information

Connection scheme
Scheme made with Fritzing.
Functions
Await Input
Await Input State
Awaits a digital value.
void function_0_Schalter(){
int value = digitalRead(pin_0_switch);
function_0_Schalter();
}
int value = digitalRead(pin_0_switch);
void function_0_Schalter(){
int value = digitalRead(pin_0_switch);
state = 1;
}
3.3 - Slider
A slider returns a value based on its position.
Information

Connection scheme
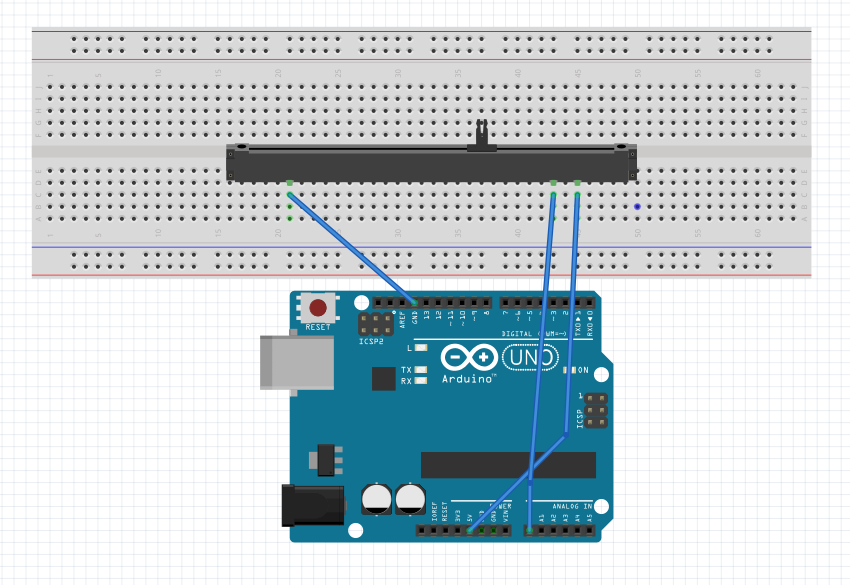
Scheme made with Fritzing.
Functions
Await Input
Await Input State
Awaits a analog value.
void function_0_Schieberegler(){
int value = analogRead(pin_0_slider);
function_0_Schieberegler();
}
int value = analogRead(pin_0_slider);
void function_0_Schieberegler(){
int value = analogRead(pin_0_slider);
state = 1;
}
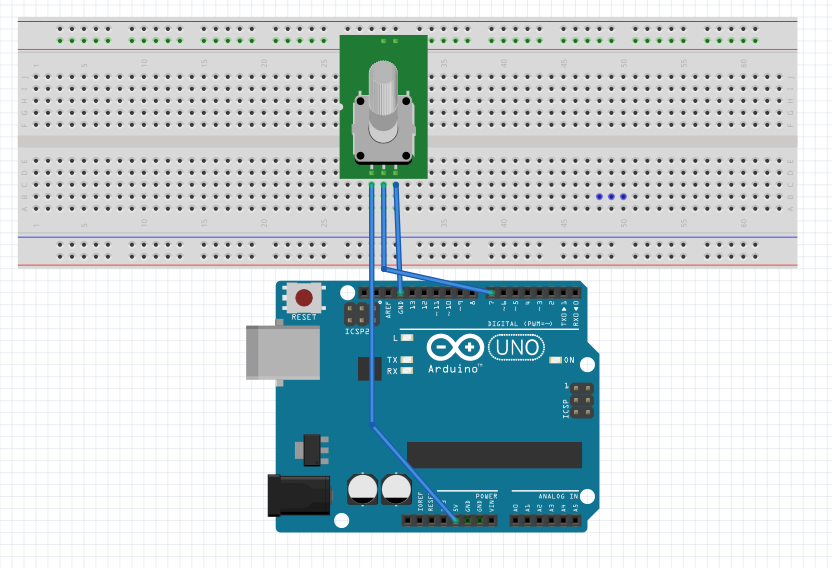
3.4 - Potentiometer
A potentiometer returns a dynamic value based on the rotation.
Information

Connection scheme
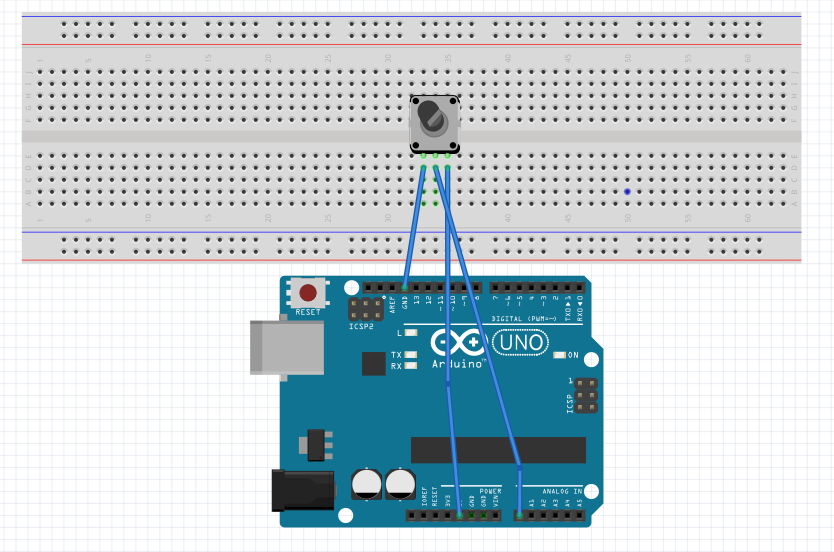
Scheme made with Fritzing.
Functions
Await Input
Await Input State
Awaits a analog value.
void function_0_Potentiometer(){
int value = analogRead(pin_0_potentiometer);
function_0_Potentiometer();
}
int value = analogRead(pin_0_potentiometer);
void function_0_Potentiometer(){
int value = analogRead(pin_0_potentiometer);
state = 1;
}