Das ist eine für den Ausdruck optimierte Ansicht des gesamten Kapitels inkl. Unterseiten. Druckvorgang starten.
Ausgabe
- 1: LED
- 2: Summer
- 3: Vibrationsmotor
- 4: Relais
- 5: Servo
1 - LED

Steckplan
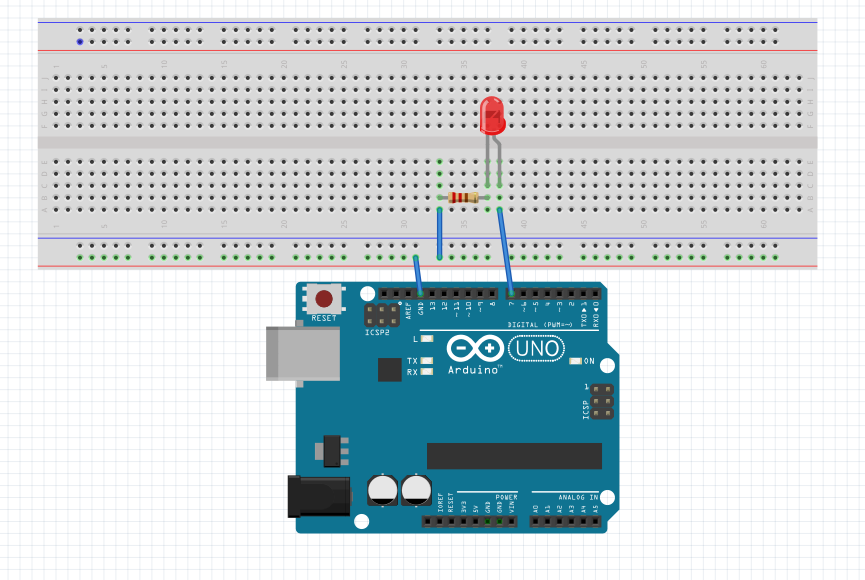
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
function_0_led();
}
digitalWrite(pin_0_led, HIGH);
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus.
void function_0_led(){
digitalWrite(pin_0_led, LOW);
function_0_led();
}
digitalWrite(pin_0_led, LOW);
void function_0_led(){
digitalWrite(pin_0_led, LOW);
state = 1;
}
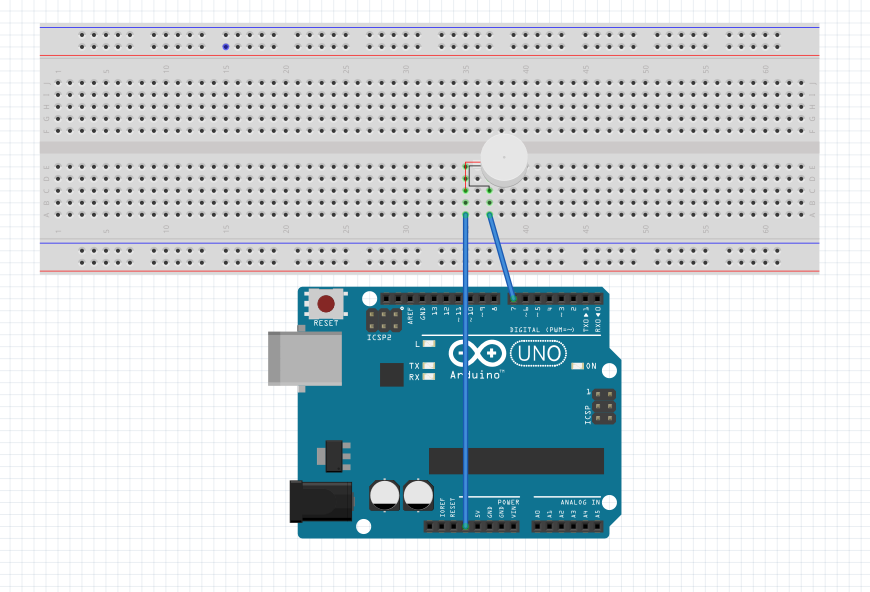
2 - Summer

Steckplan
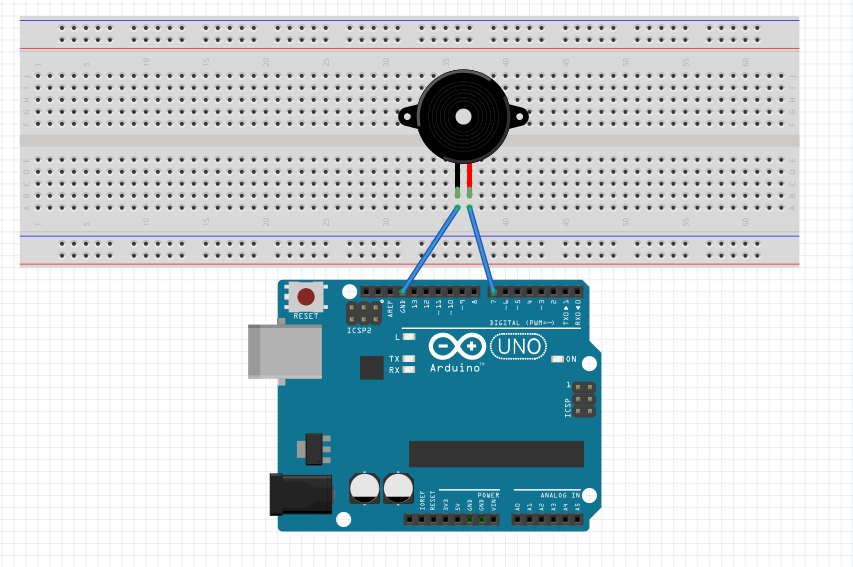
Erstellt mit Fritzing.
Funktionen
An

An Zustand
Schaltet die Komponente an.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, HIGH);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, LOW);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
state = 1;
}
3 - Vibrationsmotor

Bild von funduino, CC-BY-SA.
Steckplan
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, HIGH);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
state = 1;
}
Aus

Aus Zustand
Schaltet die Komponente aus.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, LOW);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
state = 1;
}
4 - Relais

Steckplan
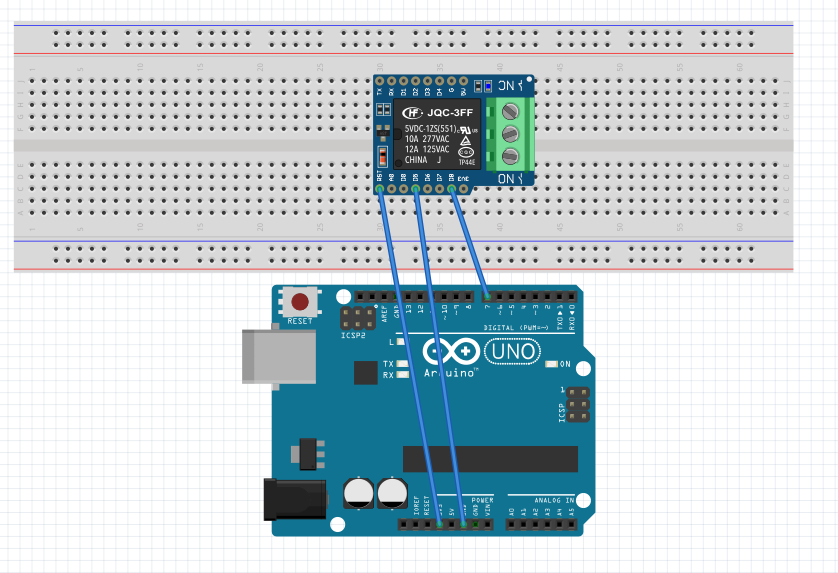
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
function_0_relay();
}
digitalWrite(pin_0_relay, HIGH);
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
function_0_relay();
}
digitalWrite(pin_0_relay, LOW);
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
state = 1;
}
5 - Servo

Steckplan
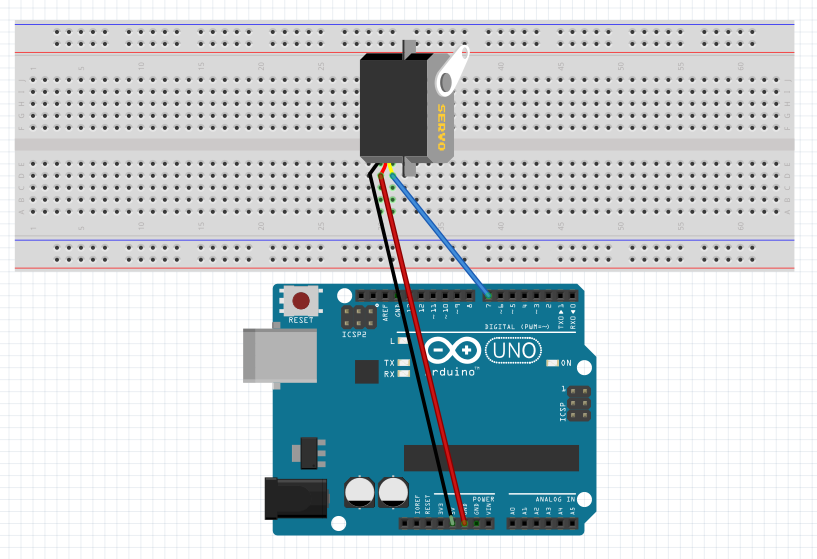
Erstellt mit Fritzing.
Funktionen
Grad

Dreht den Servo auf 0 Grad

Dreht den Servo auf 180 Grad
Diese Funktion dreht den Servo auf die angegebene Gradzahl.
void function_1_servo(){
servo_0.write(0);
function_1_servo();
}
servo_0.write(0);
void function_0_servo(){
servo_0.write(0);
state = 1;
}