Die folgenden Seiten beschreiben die verfügbaren Komponenten in Automaduino. Sie sind wie im Editor gruppiert: Ausgabe, Benutzereingabe und Sensoren.
Das ist eine für den Ausdruck optimierte Ansicht des gesamten Kapitels inkl. Unterseiten. Druckvorgang starten.
Komponenten
Welche Komponenten werden aktuell unterstützt?
- 1: Ausgabe
- 1.1: LED
- 1.2: Summer
- 1.3: Vibrationsmotor
- 1.4: Relais
- 1.5: Servo
- 2: Sensoren
- 2.1: Bewegungssensor
- 2.2: Temperatursensor
- 2.3: Nässesensor
- 2.4: Vibrationsensor
- 2.5: Lautstärkesensor
- 2.6: Ultraschallmesser
- 3: Benutzereingabe
- 3.1: Taster
- 3.2: Schalter
- 3.3: Schieberegler
- 3.4: Potentiometer
1 - Ausgabe
Ausgabe Komponenten wie LEDs oder Summer erhalten keine Eingabe, sondern beeinflussen stattdessen ihre Umgebung.
1.1 - LED
Eine LED, überlicherweise verwendet mit einem Widerstand, leuchtet.
Information

Steckplan
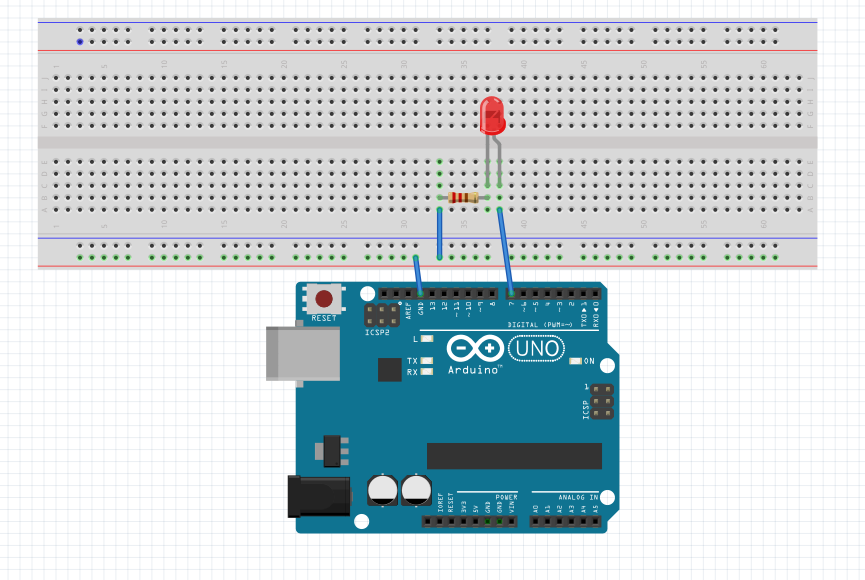
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
function_0_led();
}
digitalWrite(pin_0_led, HIGH);
void function_0_led(){
digitalWrite(pin_0_led, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus.
void function_0_led(){
digitalWrite(pin_0_led, LOW);
function_0_led();
}
digitalWrite(pin_0_led, LOW);
void function_0_led(){
digitalWrite(pin_0_led, LOW);
state = 1;
}
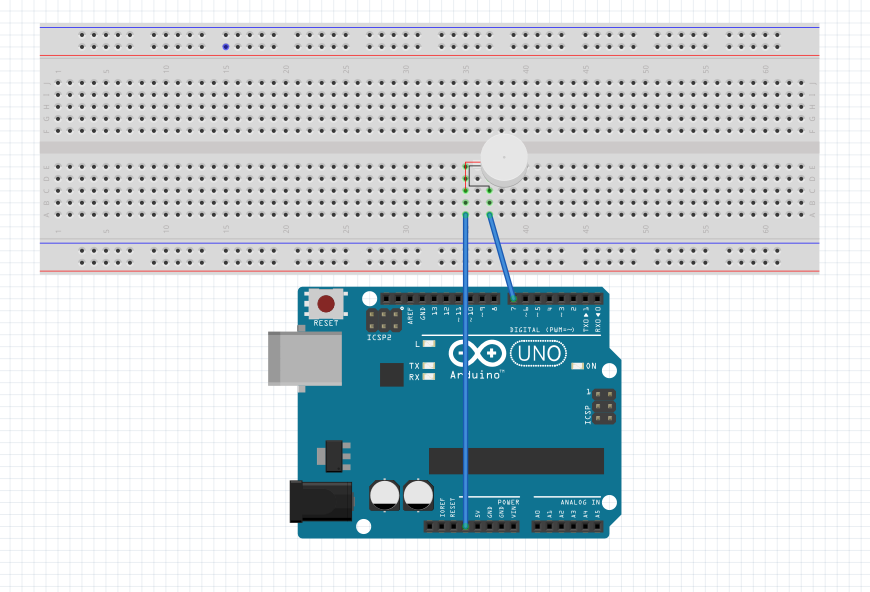
1.2 - Summer
Ein Summer macht ein Geräusch.
Information

Steckplan
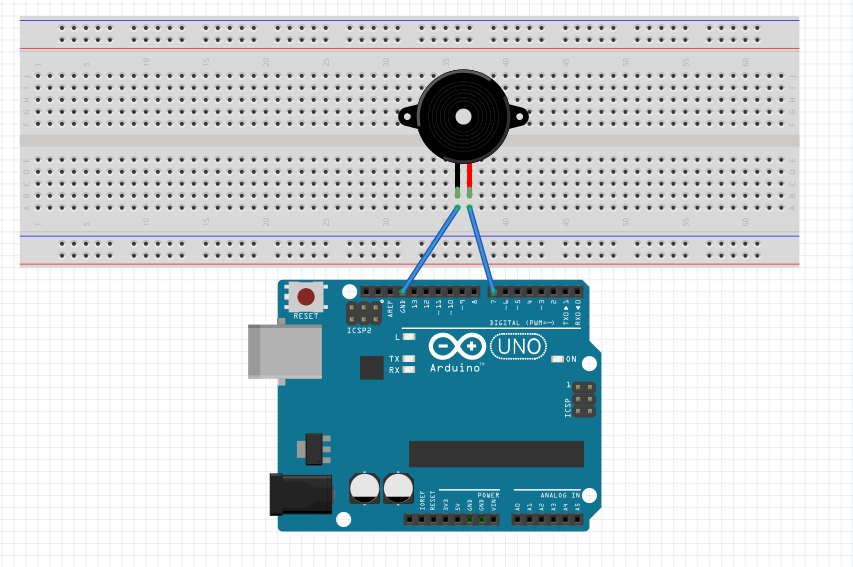
Erstellt mit Fritzing.
Funktionen
An

An Zustand
Schaltet die Komponente an.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, HIGH);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus.
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
function_0_buzzer();
}
digitalWrite(pin_0_buzzer, LOW);
void function_0_buzzer(){
digitalWrite(pin_0_buzzer, LOW);
state = 1;
}
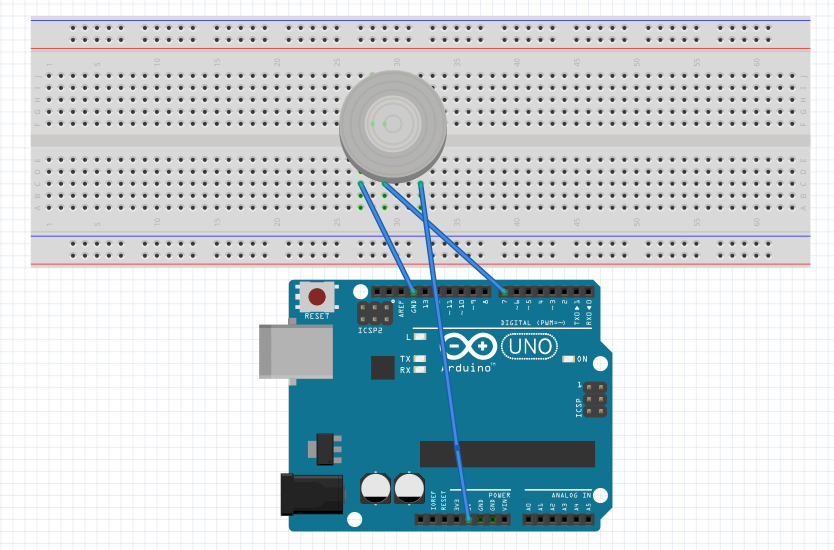
1.3 - Vibrationsmotor
Ein Vibrationsmotor vibriert. Er ist beispielsweise in einem Smartphone verbaut.
Information

Bild von funduino, CC-BY-SA.
Steckplan
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, HIGH);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, HIGH);
state = 1;
}
Aus

Aus Zustand
Schaltet die Komponente aus.
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
function_0_vibrationMotor();
}
digitalWrite(pin_0_vibrationMotor, LOW);
void function_0_vibrationMotor(){
digitalWrite(pin_0_vibrationMotor, LOW);
state = 1;
}
1.4 - Relais
Ein Relais wird verwendet um eine weitere elektrische Komponente ein- und auszuschalten.
Information

Steckplan
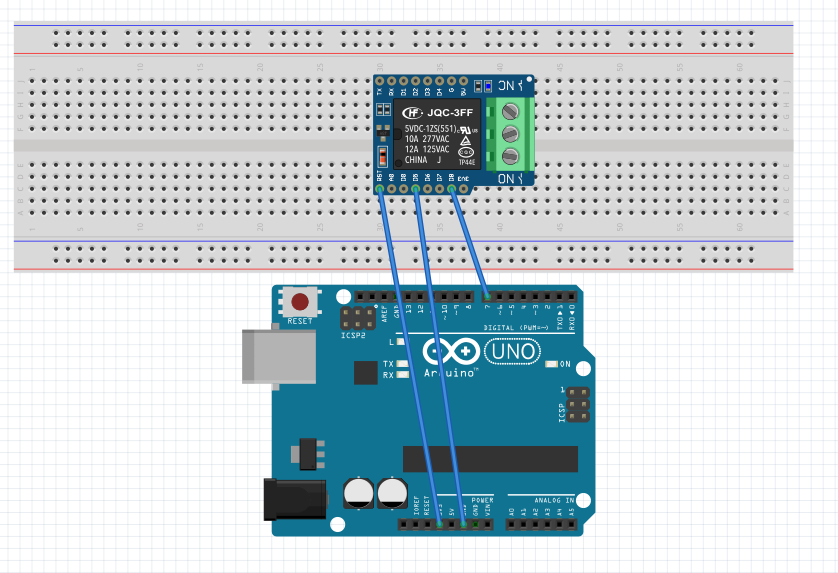
Erstellt mit Fritzing.
Funktionen
An
An Zustand
Schaltet die Komponente an.
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
function_0_relay();
}
digitalWrite(pin_0_relay, HIGH);
void function_0_relay(){
digitalWrite(pin_0_relay, HIGH);
state = 1;
}
Aus
Aus Zustand
Schaltet die Komponente aus
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
function_0_relay();
}
digitalWrite(pin_0_relay, LOW);
void function_0_relay(){
digitalWrite(pin_0_relay, LOW);
state = 1;
}
1.5 - Servo
Ein Servo ist ein kleiner Motor, der gedreht werden kann.
Information

Steckplan
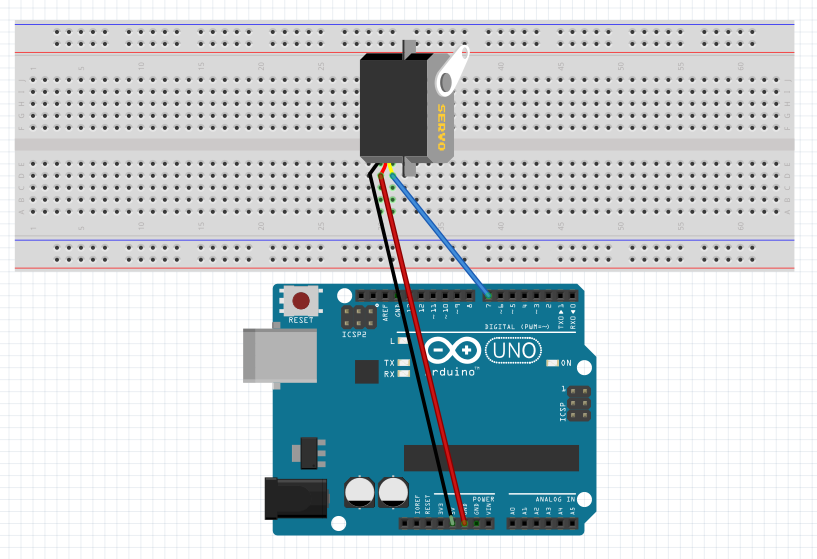
Erstellt mit Fritzing.
Funktionen
Grad

Dreht den Servo auf 0 Grad

Dreht den Servo auf 180 Grad
Diese Funktion dreht den Servo auf die angegebene Gradzahl.
void function_1_servo(){
servo_0.write(0);
function_1_servo();
}
servo_0.write(0);
void function_0_servo(){
servo_0.write(0);
state = 1;
}
2 - Sensoren
Sensoren messen verschiedene Werte aus ihrer Umgebung.
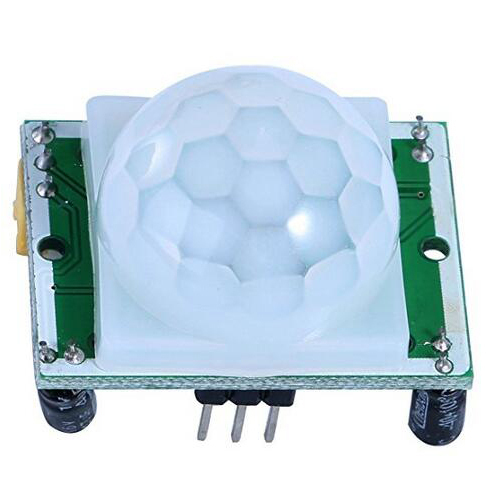
2.1 - Bewegungssensor
Ein Bewegungssensor reagiert auf Bewegungen in seiner Nähe.
Information
Steckplan
Erstellt mit Fritzing.
Funktionen
Digital Messen

Digital Messen Zustand
Misst einen Wert digital.
void function_0_motionSensor(){
int value = digitalRead(pin_0_motionSensor);
function_0_motionSensor();
}
int value = digitalRead(pin_0_motionSensor);
void function_0_motionSensor(){
int value = digitalRead(pin_0_motionSensor);
state = 1;
}
2.2 - Temperatursensor
Ein Temperatursensor misst die aktuelle Lufttemperatur.
Information
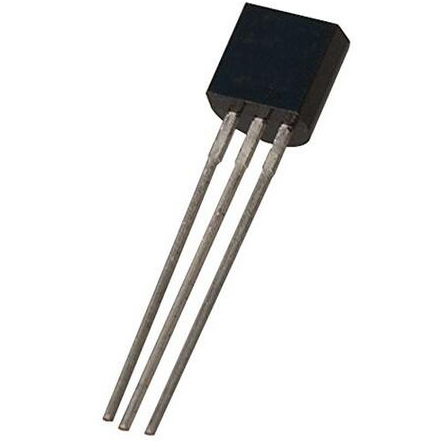
Steckplan
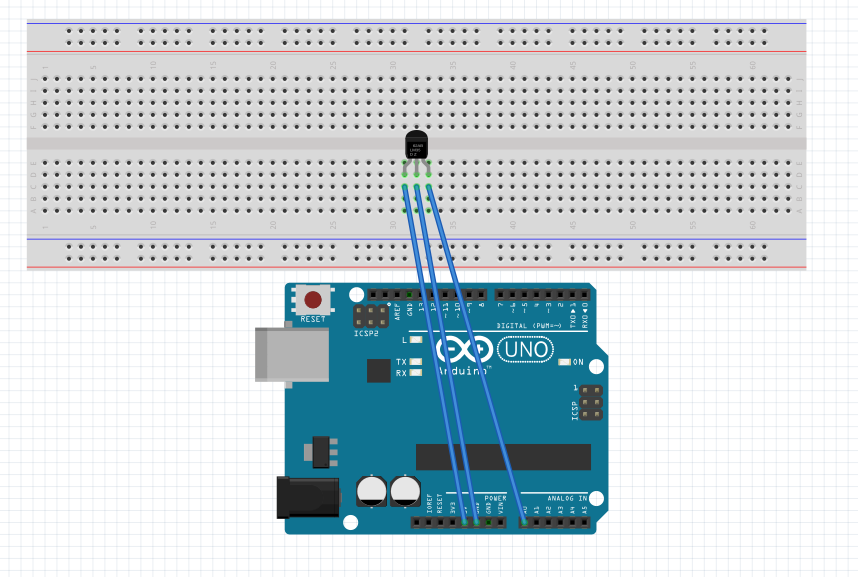
Erstellt mit Fritzing.
Funktionen
Analog Messen

Analog Messen Zustand
Misst einen Wert analog und gibt ihn in Celsius aus.
void function_0_temperatureSensor(){
int value = map(analogRead(pin_0_temperatureSensor), 0, 410, -50, 150);
function_0_temperatureSensor();
}
int value = map(analogRead(pin_1_temperatureSensor), 0, 410, -50, 150);
void function_0_temperatureSensor(){
int value = map(analogRead(pin_1_temperatureSensor), 0, 410, -50, 150);
state = 1;
}
2.3 - Nässesensor
Ein Nässesensor misst die Feuchtigkeit in Erde oder in einem Glas.
Information

Steckplan
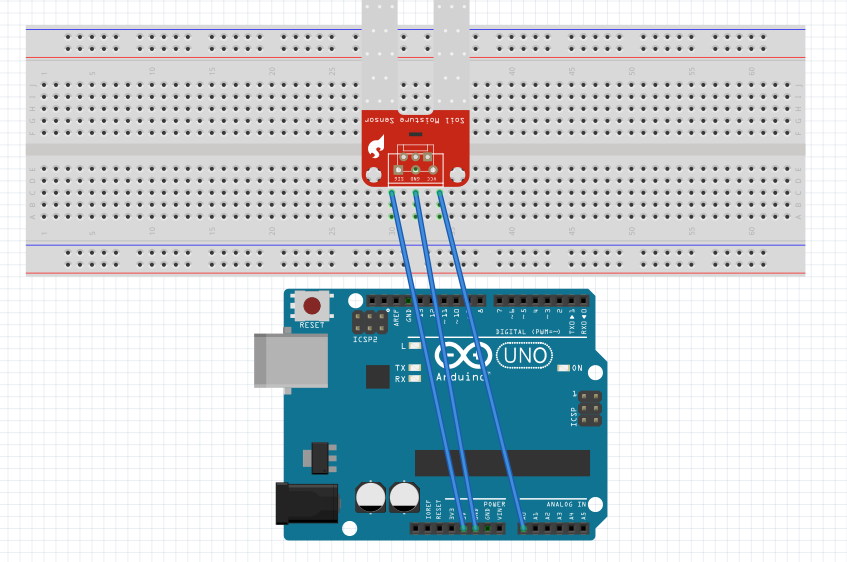
Erstellt mit Fritzing.
Funktionen
Analog Messen

Analog Messen Zustand
Misst einen Wert analog.
void function_0_humiditySensor(){
int value = analogRead(pin_0_humiditySensor);
function_0_humiditySensor();
}
int value = analogRead(pin_0_humiditySensor);
void function_0_humiditySensor(){
int value = analogRead(pin_0_humiditySensor);
state = 1;
}
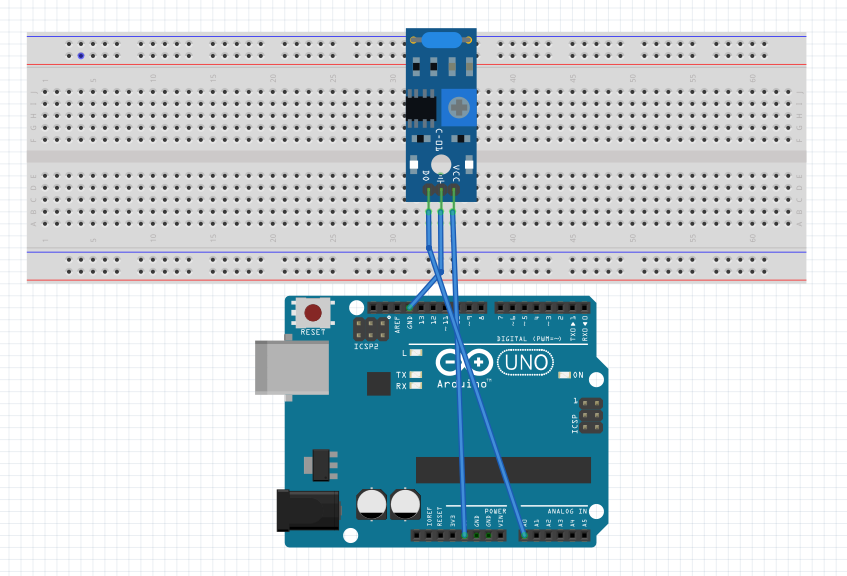
2.4 - Vibrationsensor
Ein Vibrationssensor reagiert auf Vibrationen oder Schütteln.
Information

Steckplan
Erstellt mit Fritzing.
Funktionen
Digital Messen

Digital Messen Zustand
Misst einen Wert digital.
void function_0_vibrationSensor(){
int value = digitalRead(pin_0_vibrationSensor);
function_0_vibrationSensor();
}
int value = digitalRead(pin_0_vibrationSensor);
void function_0_vibrationSensor(){
int value = digitalRead(pin_0_vibrationSensor);
state = 1;
}
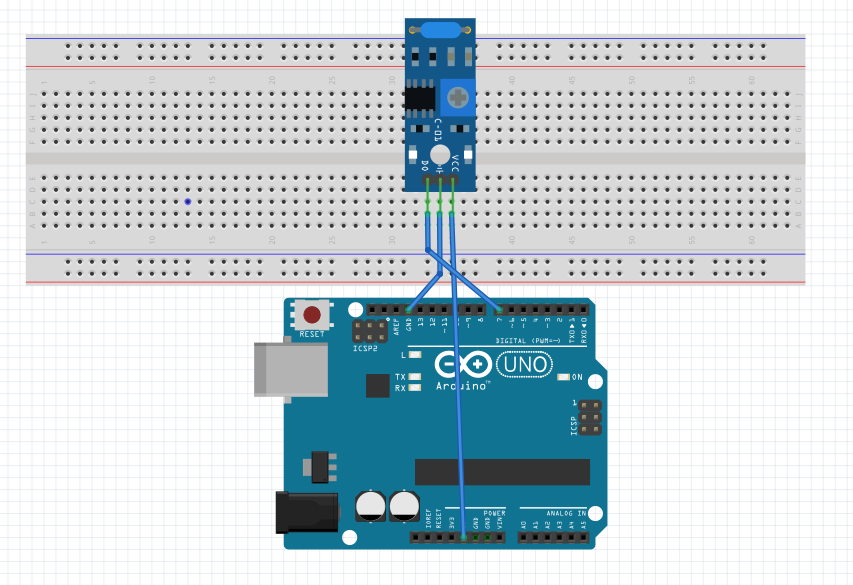
2.5 - Lautstärkesensor
Ein Lautstärkesensor misst Geräusche in seiner Umgebung.
Information
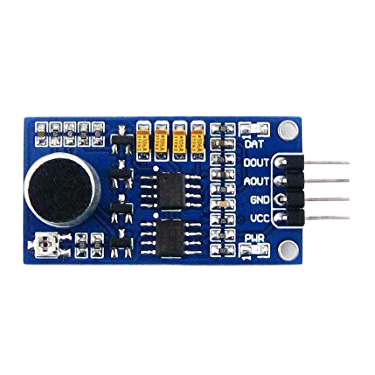
Bild von funduino, CC-BY-SA.
Steckplan
Erstellt mit Fritzing.
Funktionen
Analog Messen

Analog Messen Zustand
Misst einen Wert analog.
void function_0_Lautst_rke_sensor(){
int value = analogRead(pin_0_loudnessSensor);
function_0_Lautst_rke_sensor();
}
int value = analogRead(pin_0_loudnessSensor);
void function_0_Lautst_rke_sensor(){
int value = analogRead(pin_0_loudnessSensor);
state = 1;
}
2.6 - Ultraschallmesser
Ein Ultraschallmesser sendet eine Ultraschallwelle aus um eine Distanz zu messen.
Information

Steckplan
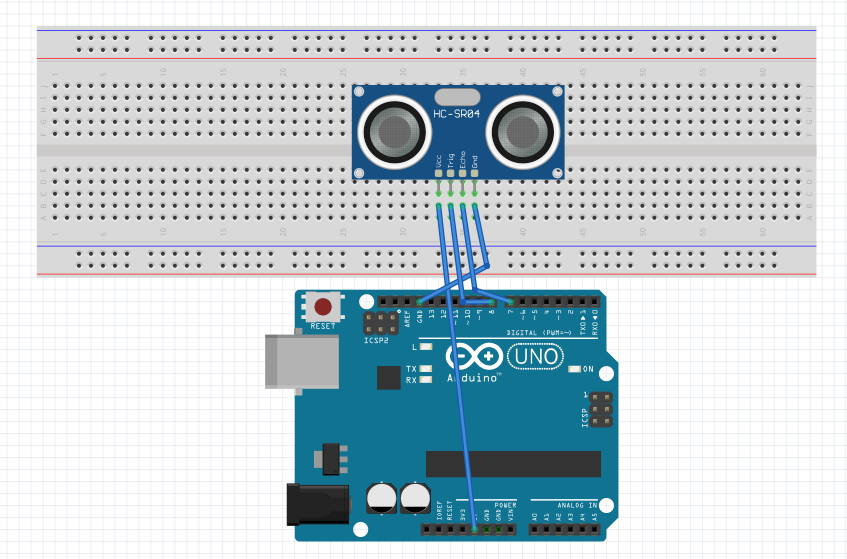
Erstellt mit Fritzing.
Funktionen
Welle senden
Welle senden Zustand
Sendet eine Ultraschallwelle aus.
void function_0_Ultraschall_messer(){
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
function_1_Ultraschall_messer();
}
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
void function_0_Ultraschall_messer(){
digitalWrite(pin_2_ultrasonicRanger, LOW);
delay(5);
digitalWrite(pin_2_ultrasonicRanger, HIGH);
delay(10);
digitalWrite(pin_2_ultrasonicRanger, LOW);
state = 1;
}
Welle lesen

Welle lesen Zustand
Liest eine Ultraschallwelle aus.
void function_1_Ultraschall_messer(){
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
function_1_Ultraschall_messer();
}
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
void function_1_Ultraschall_messer(){
long pulseValueFromWave = pulseIn(pin_2_ultrasonicRanger, HIGH);
long value = (pulseValueFromWave/2) * 0.03432;
state = 1;
}
3 - Benutzereingabe
Komponenten aus der Kategorie Benutzereingabe warten darauf, dass ein Nutzer sie verwendet.
3.1 - Taster
Ein Taster reagiert darauf wenn ein Nutzer ihn drückt.
Information

Steckplan
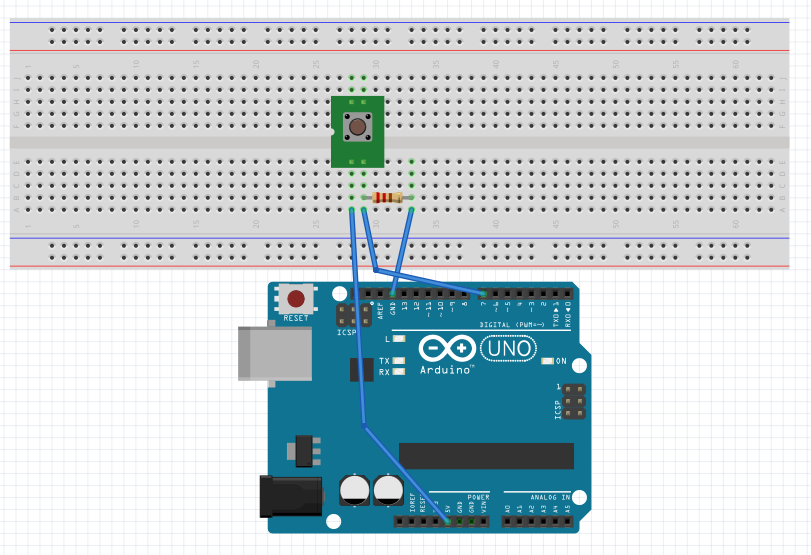
Erstellt mit Fritzing.
Funktionen
Erwarte Eingabe

Erwarte Eingabe Zustand
Erwartet einen digitalen Wert.
void function_0_button(){
int value = digitalRead(pin_0_button);
delay(200);
function_0_button();
}
int value = digitalRead(pin_0_button);
delay(200);
void function_0_button(){
int value = digitalRead(pin_0_button);
delay(200);
state = 1;
}
3.2 - Schalter
Ein Schalter ähnelt einem Taster, behält seinen Zustand aber bei.
Information

Steckplan
Erstellt mit Fritzing.
Funktionen
Erwarte Eingabe
Erwarte Eingabe Zustand
Erwartet einen digitalen Wert.
void function_0_Schalter(){
int value = digitalRead(pin_0_switch);
function_0_Schalter();
}
int value = digitalRead(pin_0_switch);
void function_0_Schalter(){
int value = digitalRead(pin_0_switch);
state = 1;
}
3.3 - Schieberegler
Der Wert eines Schiebereglers basiert auf seiner Position.
Information

Steckplan
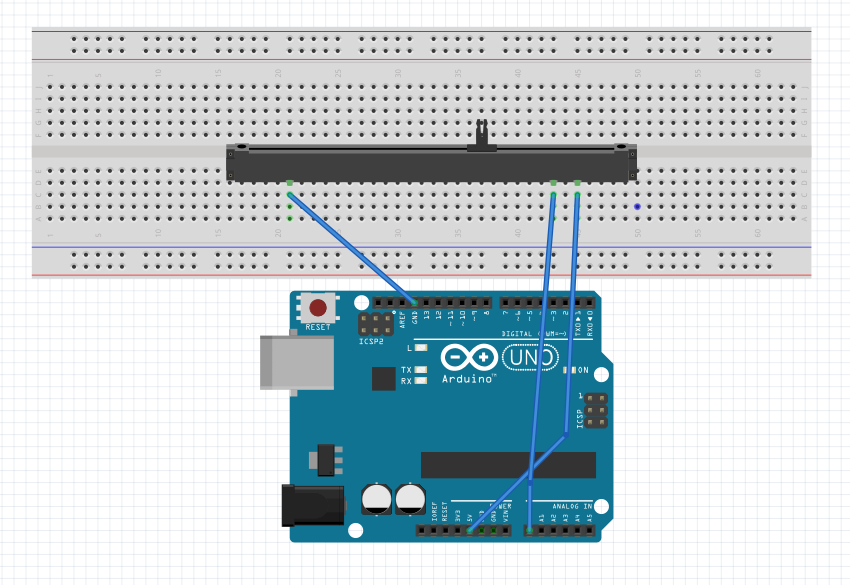
Erstellt mit Fritzing.
Funktionen
Erwarte Eingabe
Erwarte Eingabe Zustand
Erwartet einen analogen Wert.
void function_0_Schieberegler(){
int value = analogRead(pin_0_slider);
function_0_Schieberegler();
}
int value = analogRead(pin_0_slider);
void function_0_Schieberegler(){
int value = analogRead(pin_0_slider);
state = 1;
}
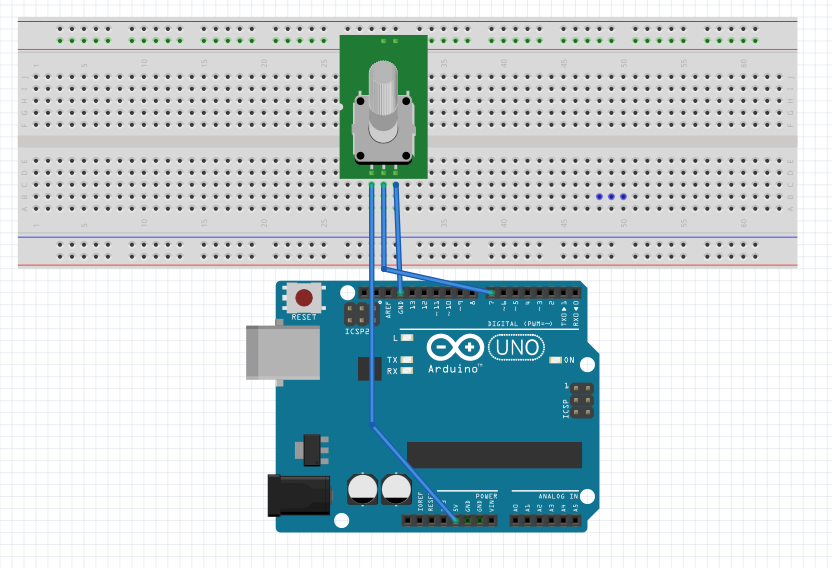
3.4 - Potentiometer
A potentiometer returns a dynamic value based on the rotation.
Information

Steckplan
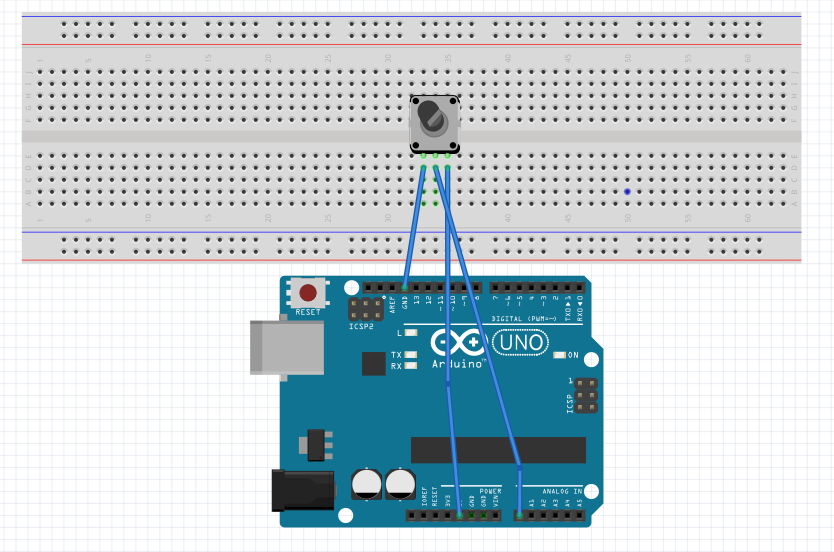
Erstellt mit Fritzing.
Funktionen
Erwarte Eingabe
Erwarte Eingabe Zustand
Erwartet einen analogen Wert.
void function_0_Potentiometer(){
int value = analogRead(pin_0_potentiometer);
function_0_Potentiometer();
}
int value = analogRead(pin_0_potentiometer);
void function_0_Potentiometer(){
int value = analogRead(pin_0_potentiometer);
state = 1;
}